
オンカートタイプ
協働ロボットと機能モジュールをカート上に組み込む事により、後工程をコンパクトに集約し省力化・自動化を実現するオンカート型のロボットシステムです。
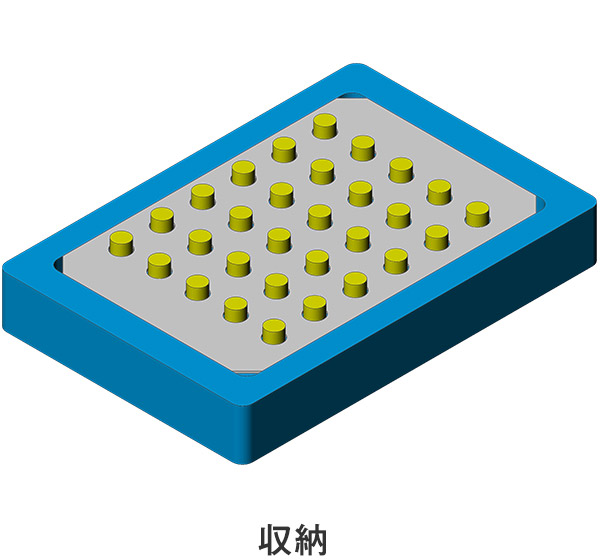
- 機能モジュールは、収納・計測・洗浄・エアブロー・バリ取り・バフ研磨・マーキングなどカスタマイズが可能
- 導入後の仕様変更もわずかな作業で対応が可能
- 機械への接続・切り離しが容易なため、他設備への転用など、さまざまな工場レイアウトに柔軟に対応

協働ロボットと機能モジュールをカート上に組み込む事により、後工程をコンパクトに集約し省力化・自動化を実現するオンカート型のロボットシステムです。
| 型式 | オンカートタイプ | |
|---|---|---|
| 対応機種 | Cincom A20,L12,L20,L32,Miyano BNA42,BNJ42/51 | |
| 搭載ロボット | モデル | ユニバーサルロボット UR3 |
| リーチ | 500mm | |
| 自由度 | 6軸 | |
| 搭載ハンド | ROBOTIQ HAND-E | |
| 可搬ワーク | 最大ワーク質量 | 800g※1 |
| 電源容量 | 1.5kVA※2 | |
| 定格電圧 | 単相AC100 ~ 240V(50Hz/60Hz) | |
| 据付方法 | 付属アジャスタ設置 | |
| ユーザーインターフェース | 操作盤、ティーチングペンダント | |
| 安全装置 | セーフティレーザスキャナ 2基 | |
| サイズ・質量 | 幅 | 800mm |
| 奥行 | 580mm | |
| 高さ | 762mm | |
| 質量 | 210kg | |
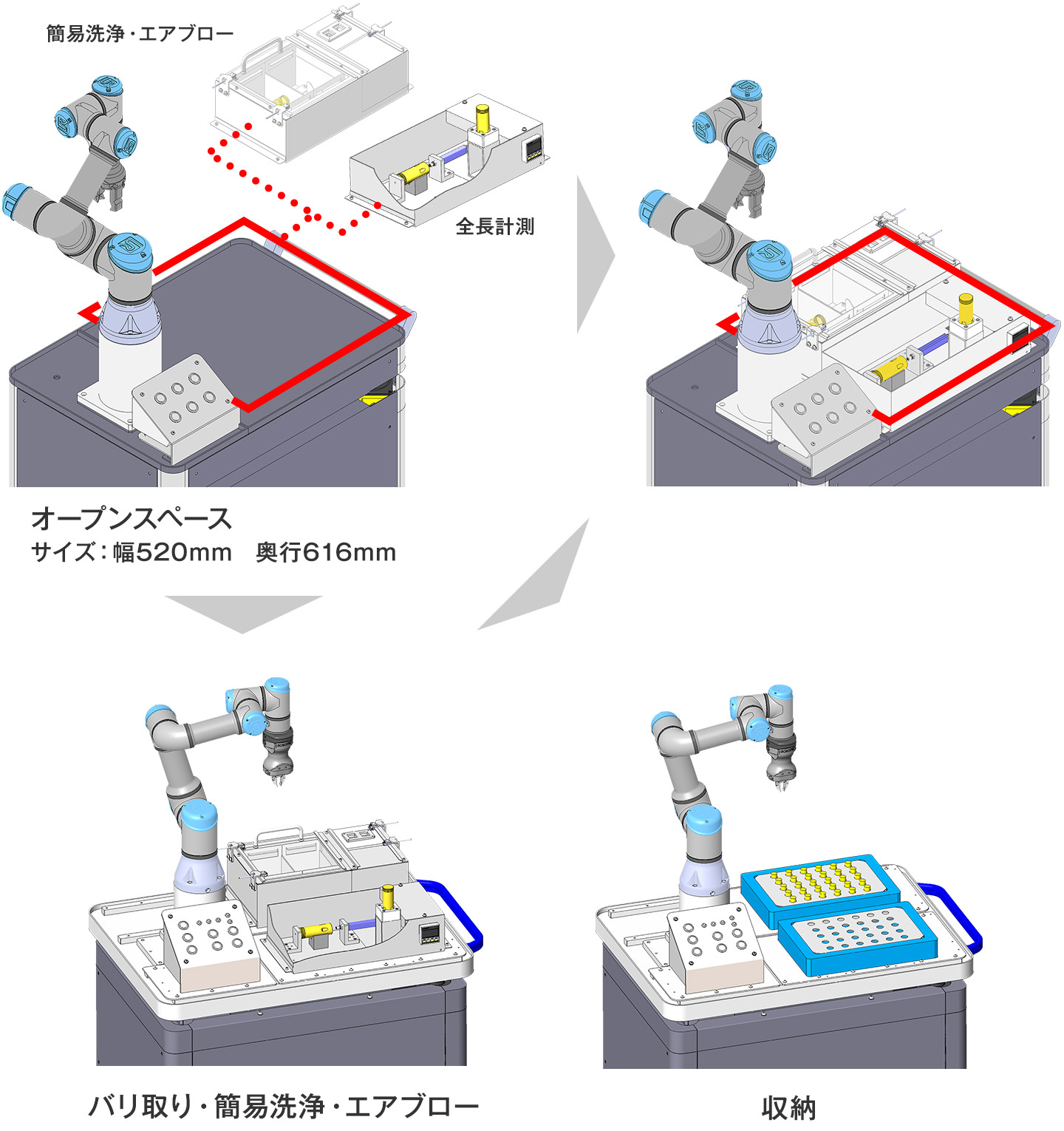
| オープンスペースサイズ※3 | 幅 | 520mm |
| 奥行 | 616mm | |
お客さまのご要望に合わせて、機能モジュールをご用意致します。
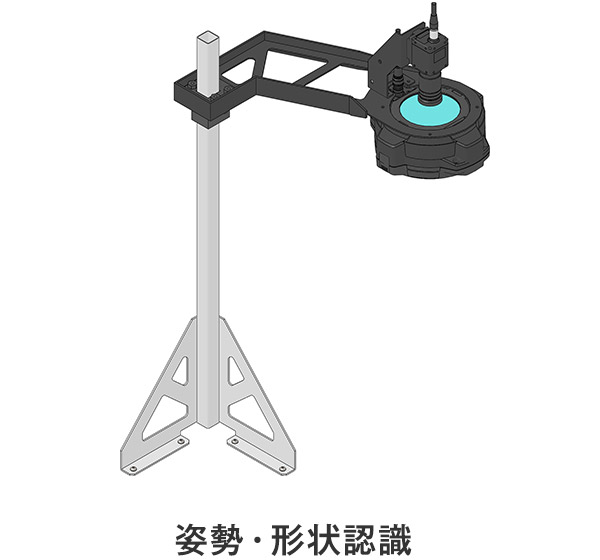

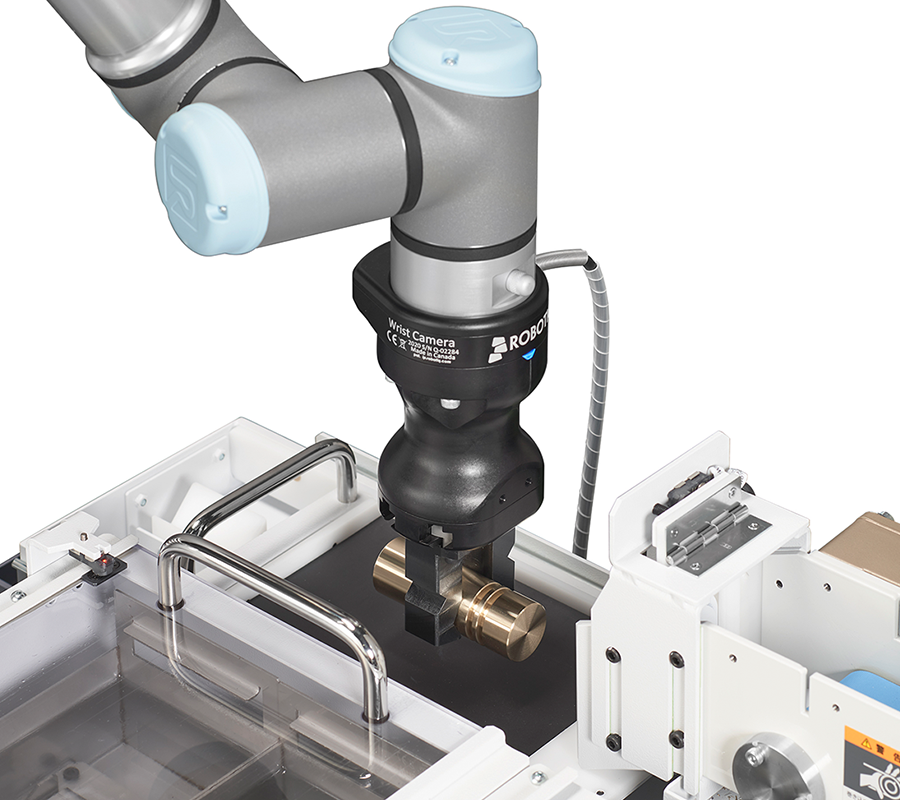
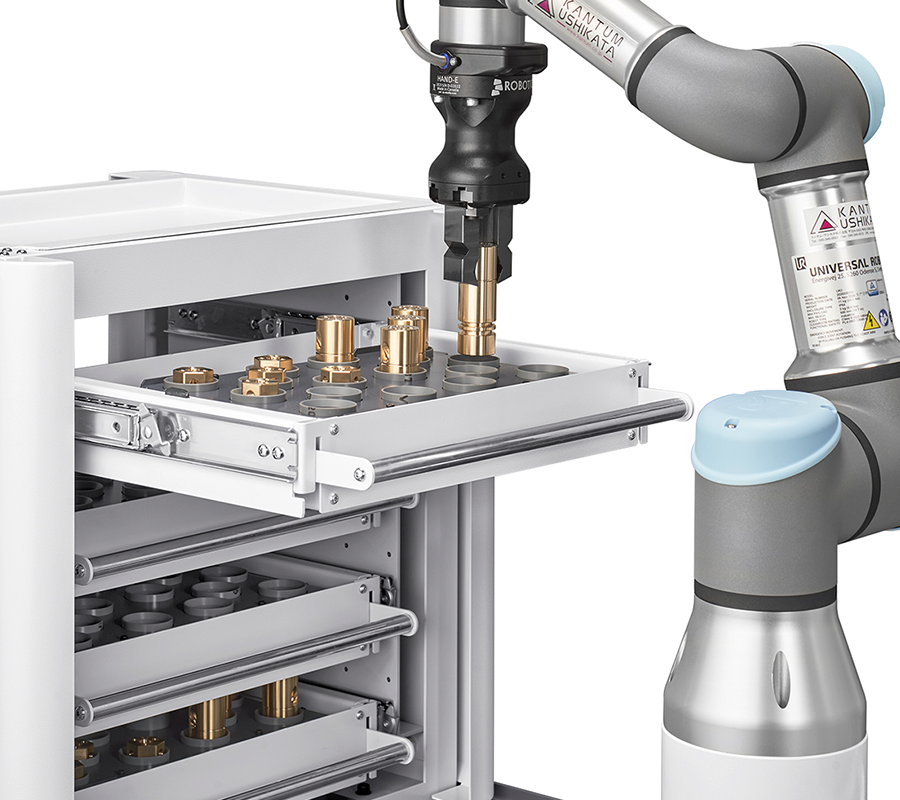
バラ置きされたワークの姿勢・形状をカメラにより認識しピッキング、簡易洗浄、エアブローを行ない、パレタイジングするシステムです。



パレットに収納されたワークの内径・外径・長手計測及び、カメラによる異物付着や打痕確認などの外観検査を行なう自動検査システムです。ロボットハンドに搭載したカメラで収納ワークを識別し、計測工程を切り替えます。
| 型式 | 計測セルドッキング | ||
|---|---|---|---|
| 対応機種 | シチズン ロボットシステム オンカートタイプ | ||
| 搭載ステーション | 内径、外径、長手、画像処理 | ||
| 内径測定 | 仕様 | ø5内径測定(長手方向複数個所測定可) | |
| 対象ワークサイズ | 内径ø3~ø9(ゲージ交換必要) 深さ30mm以下 |
||
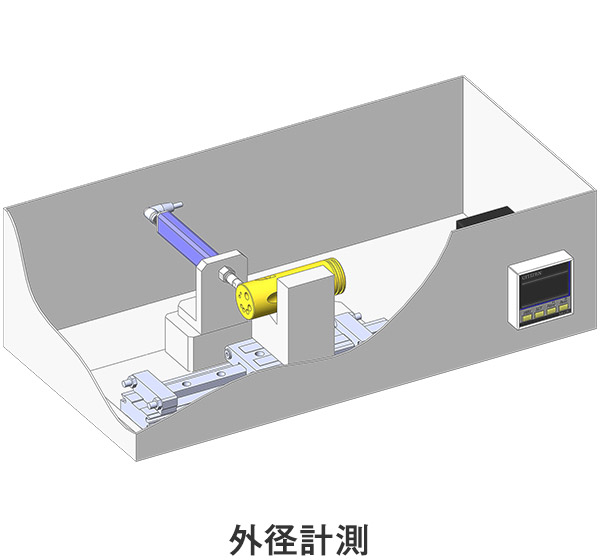
| 外径測定 | 仕様 | ø9・ø12・ø16外径測定(長手方向複数個所測定可) | |
| 対象ワークサイズ | 外径ø2~ø32(メカ調整必要) | ||
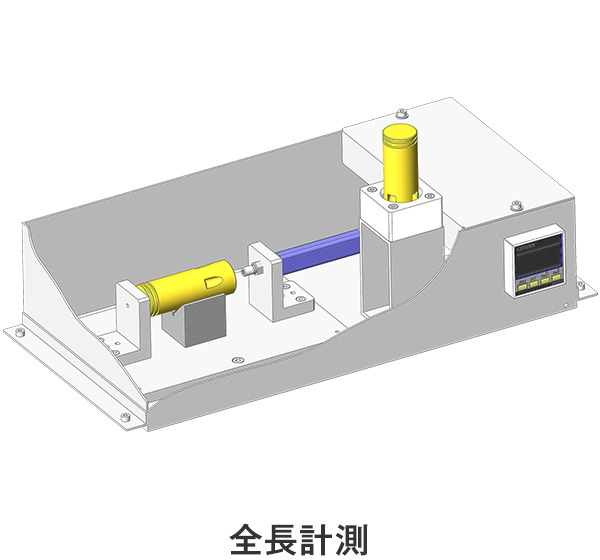
| 長手測定 | 仕様 | 全長・ザグリ深さ測定可能 | |
| 対象ワークサイズ | 全長50mm以下、段差8mm以下 | ||
| 画像処理 | 仕様 | 端面部圧痕・穴詰まり検出 | |
| 対象ワークサイズ | 外径ø20mm以下 | ||
| 電源容量 | 1.7kVA | ||
| 定格電圧 | AC100V(50/60Hz) | ||
| 空圧制御圧力 | 0.4MPa以上 | ||
| サイズ・質量 | 幅 | 1,400mm | |
| 奥行 | 700mm | ||
| 高さ | 1,750mm | ||
| 質量 | 750kg | ||
| オプション | 測定ステーション※4 | 内径、外径、長手、画像処理、振れ、平面度、ねじ有効径など | |
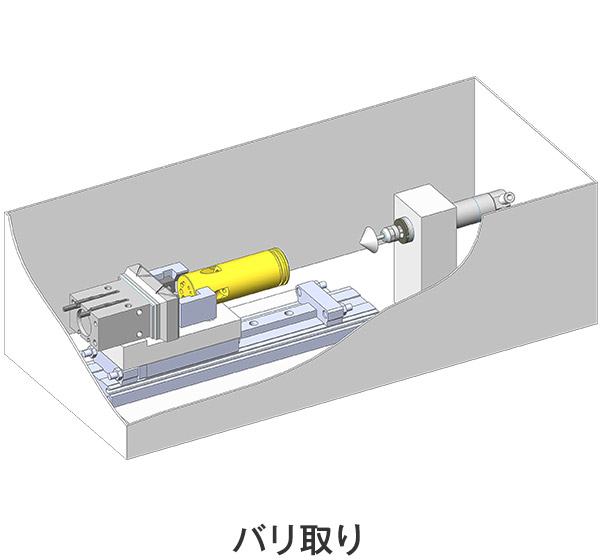
| 機能ステーション※4 | バリ取り、簡易洗浄など | ||
| 使用計測機器 内径、外径、長手測定 |
接触式変位センサSAシリーズ(シチズンファインデバイス製) 分解能:0.1μm |
||
| 画像処理 | カメラ | XG-Xシリーズ | |
| 分解能 | 7.5μm/pixel | ||
| レンズ | CA-Lシリーズ | ||
| 照明 | CA-Dシリーズ(キーエンス製) | ||











